Integrazione del rilevamento immagini 2D e 3D nell’IoT
Il documento informativo “I sensori intelligenti che abilitano l’Intelligent Internet of Things” discute le tendenze principali nello sviluppo dei sensori e come le tecnologie di rilevamento come il radar, il LiDAR e l'acquisizione delle immagini a tempo di volo forniscano ancora più informazioni consentendo ai sistemi di percepire gli oggetti nello spazio 3D. Questo blog ne è un’estensione e si concentra su come utilizzare l’approccio dell’apertura dei pixel per estrarre informazioni sulla profondità da un sensore di immagine CMOS e creare normali immagini 2D, nonché sui circuiti dei pixel e su come superare gli ostacoli di un sistema di rilevamento di immagini 3D.
Oggi le immagini e i video 3D sono diventati popolari nella nostra vita quotidiana. Come inglobare e combinare i contenuti 3D con quelli 2D è un argomento molto importante. In generale, due immagini bidimensionali da due prospettive diverse possono essere utilizzate per creare un’immagine tridimensionale, poiché questo meccanismo imita la percezione dell'occhio umano.
Ad esempio, una telecamera 3D deve registrare due immagini contemporaneamente e visualizzare due immagini visibili all’occhio destro e all’occhio sinistro dell’uomo per la percezione 3D. Questa percezione può essere considerata un approccio passivo. D’altra parte, la modalità attiva può essere utilizzata con la sorgente luminosa per percepire la profondità dell’oggetto. In base alle proprietà della luce riflessa, è possibile creare un’immagine tridimensionale attraverso calcoli di post-elaborazione. In particolare il tempo di volo (TOF) è una stima del tempo di viaggio della luce parallela che viene emessa da una sorgente luminosa, raggiunge un oggetto, viene riflessa da un oggetto e raggiunge un sensore. La profondità degli oggetti può essere dedotta facilmente dai diversi tempi di spostamento registrati nei pixel.
I sensori di immagine bidimensionali e tridimensionali sono combinati sulla base degli stessi diodi luminosi. Nelle modalità bidimensionale e tridimensionale, il circuito di campionamento duplex correlato (CDS) e il convertitore tempo-digitale (TDC) sono adottati o modificati. I circuiti di lettura utilizzano la lettura lineare e parallela rispettivamente nelle modalità 2D e 3D. Di conseguenza, per ottenere una lettura parallela si utilizza un TDC multicanale.
Sensore di immagine integrato 2D/3D
Per integrare efficacemente i sensori di immagine 2D e 3D, il fotodiodo P-diffusion_N-well_ P-substrate è adottato e controllato per funzionare in modalità di rilevamento fotografico 2D e 3D. In modalità 2D, sono stati progettati il circuito CDS e il circuito di lettura CDS, nonché un decodificatore di riga, un decodificatore di colonna e un controllore. In modalità 3D, sono stati implementatiamplificatori di senso (SA), la lettura TDC e un TDC. Il SA aumenta un impulso di trigger di un pixel per ridurre il tempo di lettura da un pixel a un TDC. La Figura 1 mostra lo schema a blocchi del sensore di immagine integrato 2D / 3D.

Figura 1: Schema a blocchi del sensore di immagine integrato 2D/3D
Circuiti dei pixel
In modalità 2D, l’obiettivo principale è acquisire informazioni sul livello di grigio e quindi la gamma dinamica è il fattore principale. Una gamma dinamica maggiore rivela una maggiore gamma di correnti luminose che vengono rilevate. Il circuito del pixel in modalità 2D, illustrato nella Figura 2, presenta un percorso aggiuntivo per rallentare la saturazione della carica. Uno di questi percorsi fornisce un’alimentazione di carica per compensare la fotodissipazione di corrente.
Figura 2: Circuito del pixel 2D
In modalità 3D, il circuito dei pixel rileva gli oggetti con informazioni sulla profondità. Il fotodiodo è polarizzato inversamente vicino alla valanga. Quando il fotodiodo rileva un fotone, induce una grande corrente. Questo fenomeno è chiamato modalità Geiger. Questo fenomeno fa sì che il circuito del pixel rilevi rapidamente i fotoni. La Figura 3 mostra il circuito del pixel 3D.
Figura 3: Circuito del pixel 3D
Quando il circuito del pixel accetta un trigger luminoso, il fotodiodo genera una grande corrente di luce che passa attraverso il transistor PMOS, M1, che agisce come un resistore. Il nodo N del fotodiodo produce una caduta di tensione che viene accelerata da un inverter. Durante il reset, il pixel viene fatto funzionare in una fase di carica in cui il nodo fotodiodo N è polarizzato su Vdd. Il transistor PMOS, M4, che si collega a un inverter e il transistor NMOS, M5, che si collega a massa, formano un percorso di feedback pull-down. Dopo il riavvio, il fotodiodo inizia a rilevare le foto ed esegue un’azione di scarica. Nel frattempo, M4 e M5 vengono attivati per ridurre rapidamente la tensione dell’inverter a 1 / 2Vdd. La Figura 4 mostra il circuito integrato dei pixel 2D / 3D, che può essere facilmente manipolato e commutato utilizzando segnali di controllo 2D e 3D.
Figura 4: Circuito pixel integrato 2D/3D
TDC multicanale
Un sistema di rilevamento di immagini 3D deve affrontare un problema di numero di circuiti di temporizzazione. L’utilizzo di circuiti di temporizzazione tradizionali, ogni pixel con il corrispondente circuito di temporizzazione per il calcolo della profondità, presenta una serie di inconvenienti: troppi circuiti di temporizzazione che rappresentano un’ampia area hardware e un elevato consumo energetico. Per risolvere i suddetti inconvenienti si ricorre quindi a un TDC multicanale composto da un TDC ad anello, un codificatore termico e un contatore a 4 bit. Un TDC ad anello a 15 stadi è stato progettato come nucleo di un circuito di temporizzazione multicanale. Quando il segnale di avvio è attivo, una porta NAND e 14 invertitori formano un’oscillazione. Le 15 uscite di un TDC ad anello vengono compresse da un codificatore termico per produrre un risultato fine a 4 bit che viene memorizzato su una matrice di latch. Allo stesso tempo, il contatore produce un risultato approssimativo a 4 bit, anch’esso memorizzato sulla matrice di latch. La basetta a 4 bit e i risultati fini possono interpretare le informazioni di profondità.
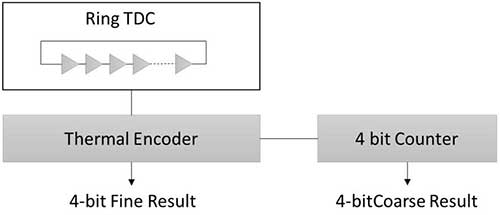
Figura 5: TDC multicanale
Funzionamento del sensore
Durante una misurazione 3D, il segnale esterno resetta il circuito dei pixel, fa oscillare il TDC e attiva l’emissione di luce. Il sensore attende la luce riflessa dagli oggetti e calcola il tempo di percorrenza in base al TDC. La profondità dell’oggetto può essere determinata in base al tempo di spostamento misurato.

Figura 6: Funzionamento del sensore
Qui una scheda FPGA è programmata per controllare la scalabilità del sistema per la registrazione di immagini 2D e 3D basate sul sensore TOF. La profondità della scatola cilindrica viene calcolata in base al tempo di volo misurato dei diodi luminosi da 850 nm. Le immagini 2D/3D sono generate dal software in esecuzione sul PC.
Per saperne di più sui sensori intelligenti e le tendenze principali sullo sviluppo dei sensori, leggete il nostro documento informativo su Il sensore intelligente che abilita l’intelligent Internet of Things”
Resta informato
Mantieniti aggiornato sulle ultime informazioni e offerte speciali!
Registrati ora
Grazie per esserti iscritto
Ben fatto! Ora fai parte di un gruppo privilegiato che riceve le ultime informazioni su prodotti, tecnologie e applicazioni direttamente nella propria casella di posta.
Scopri di più su:
Integrazione del rilevamento immagini 2D e 3D nell’IoT
Dispositivi intelligenti con sensori smart e fusione dei sensori
Manipolazione dati in un ecosistema a sensori smart
Tecnologia wireless Bluetooth 5 per sensori smart IoT
Industria 4.0 - Edge computing nell'ambiente industriale (documento informativo)





